Chirurgia con Force-feedback

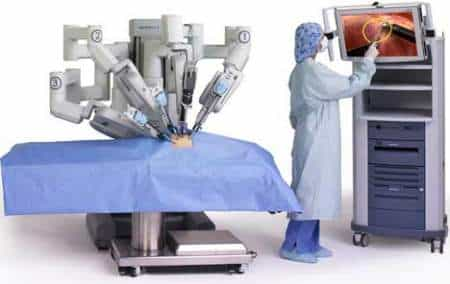
Uno dei settori della robotica più attivi, dal punto di vista della ricerca, è quello rappresentato dalle cosiddette interfacce aptiche, o display aptici. Aptico, dal greco apto che significa tocco, è un qualsiasi dispositivo comandato o che ha a che fare con il tatto. Un’interfaccia aptica è quindi un dispositivo che permette di manovrare un robot, reale o virtuale, e di riceverne delle sensazioni tattili in risposta (retroazione o feedback). Un esempio potrebbe essere un joystick con ritorno di forza (force feedback), un mouse in cui la rotellina si bloccasse quando il puntatore arrivasse ai margini dello schermo, o il display in braille utilizzato dai non vedenti. La Haption S.A. sta cercando di l’uso di interfacce aptiche nel settore medico, come training per i neochiururghi, riabilitazione, etc. Il modello visibile in foto permette un controllo 1:1 per una manipolazione virtuale del paziente, il tutto riprodotto su un maxy-schermo.  Gli studi sono quindi tutti concentrati sull’effetto force feedback per dare al chirurgo l’impressione di toccare veramente le varie parti del corpo e di tastare il tessuto per riconoscere eventuali anomalie. Questo tipo di tecnologia è attualmente impiegata in moltissimi settori, ma appaiono sempre più evidenti i vantaggi dell’uso dei robot in medicina per effettuare operazioni chirurgiche anche molto delicate o semplicemente per ridurre il rischio di infezioni. [via medgadget | haption]
Gli studi sono quindi tutti concentrati sull’effetto force feedback per dare al chirurgo l’impressione di toccare veramente le varie parti del corpo e di tastare il tessuto per riconoscere eventuali anomalie. Questo tipo di tecnologia è attualmente impiegata in moltissimi settori, ma appaiono sempre più evidenti i vantaggi dell’uso dei robot in medicina per effettuare operazioni chirurgiche anche molto delicate o semplicemente per ridurre il rischio di infezioni. [via medgadget | haption]
Potrebbe interessarti

Interventi e chirurgia laser per le patologie oculari
Le patologie oculari sono molto comuni tra la popolazione mondiale e possono avere un impatto significativo sulla qualità di vita delle persone. Fortunatamente, grazie ai progressi tecnologici negli ultimi anni, ci sono molti nuovi trattamenti chirurgici e con laser disponibili per curare queste malattie. Uno dei trattamenti chirurgici più comuni è la chirurgia della cataratta.… Continua a leggere Interventi e chirurgia laser per le patologie oculari
Patologie oculari: cause e sintomi
Le patologie oculari che richiedono la chirurgia possono essere di diverso tipo, ma tutte si manifestano con sintomi specifici che devono essere riconosciuti e curati tempestivamente per evitare complicazioni. Tra le patologie oculari che richiedono la chirurgia, la cataratta è sicuramente una delle più diffuse e importanti, soprattutto nel mondo degli anziani. Si tratta di… Continua a leggere Patologie oculari: cause e sintomi
Da Vinci 3D HD
Un nuovo modello del robot chirurgico Da Vinci sta facendo parlare di sé grazie a un nuovo sistema di visualizzazione del campo operatorio 3D e soprattutto in alta definizione. Questa apparecchiatura è ampiamente utilizzata in operazioni chirurgiche minimamente invasive in diverse parti del corpo. Come scritto nel comunicato della Intuitive Surgical, il Da Vinci ingrandisce… Continua a leggere Da Vinci 3D HD
Elisir di giovinezza
Un’altra sorpresa in arrivo per quel che riguarda le enormi abilità delle cellule delle pelle. I fibroblasti, che avevamo già menzionato perché capaci, uniti ad un oocita, di generare una cellula staminale, adesso assicurano lunga vita ad una pelle giovane e perfetta. Addio al vecchio bisturi e alle fastidiose iniezioni di botulino, da oggi è possibile… Continua a leggere Elisir di giovinezza